Research
I have several research experience in the following directions:
- FPGA In-BRAM Computation
- Neuronal Synchronization and Oscillation
- Reconfigurable Neuromorphic Hardware Design
- Autonomous Running Robot
- FPGA Digital Image Processing System
Tensor-based Hardware-Efficient On-device Training Framework with FPGA In-BRAM Computation
[Sept 2024 - June 2025, UC Santa Barbara] Voluntary Researcher advised by Prof. Zheng Zhang
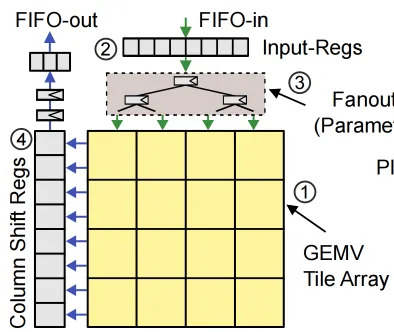
- Keywords: Compute-in-Memory, FPGA In-BRAM Computation, Tensor-Train Decomposition Our goal is to develop a tensor-based hardware-efficient on-device training framework, with the idea of implementing contraction of tensor-train using In-BRAM computation on FPGAs
- Main reference: Kabir, Md Arafat. ReMoDeL-FPGA: Reconfigurable Memory-centric Array Processor Architecture for Deep-Learning Acceleration on FPGA. Diss. University of Arkansas, 2024.
- Paper: to be finished
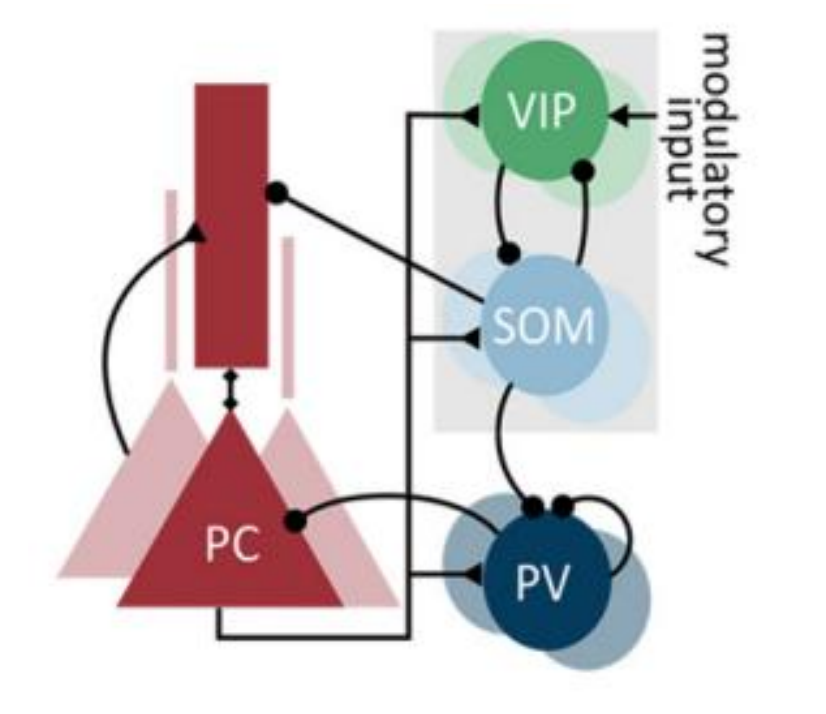
How Inhibitory Neural Circuits Govern Multi-band Neuronal Oscillations
[July - Sept 2024, New York University Shanghai] Research Assistant advised by Prof. Zhuocheng Xiao
- Keywords: Neuronal Oscillation, Spiking Neural Network, Computational Neuroscience
- Designed a scalable spiking neuron network in MATLAB to model a small copy of the mouse visual cortex L2/3, generating multiband neuronal oscillations (gamma, beta, alpha, etc.) using data from the Allen Institute (projection probability, synaptic strength, etc.)
- Conducted extensive simulations to explore the systematic relationship between biological parameters and the various types of neuronal oscillations observed in the network
- Research Document: How Inhibitory Neural Circuits Govern Multiband Neuronal Oscillations
Reconfigurable Neuromorphic Hardware Design for Spiking Neuron Model
[Feb 2023 - July 2024, HUST] Five-person Research Team Leader advised by Prof. Chao Wang
- Keywords: Neuromorphic Hardware Design, Spiking Neuron Model, Hodgkin-Huxley Neuron, Adaptive Exponential Neuron, CORDIC
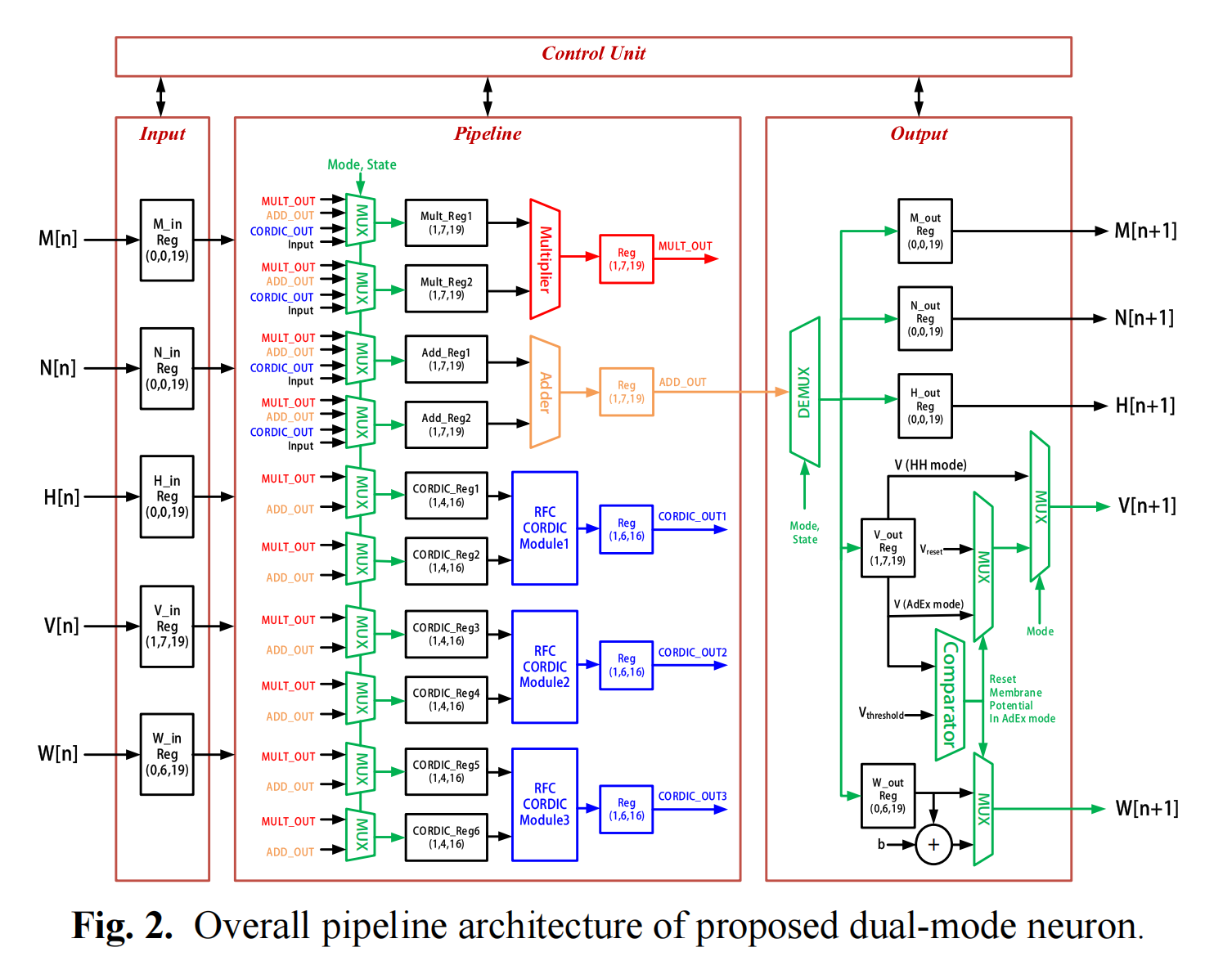
- Proposed a dual-mode spiking neuron hardware design (Hodgkin-Huxley model & Adaptive Exponential model) using an optimized reconfigurable pipeline based on data flow dependency and Reconfigurable Fast-Convergence CORDIC algorithm
- Simulated the proposed dual-mode neuron design in Python and conducted hardware implementation in Vivado, demonstrated that our design achieves up to 4.8×improvement in latency and 3.0× in accuracy
- Analyzed the implementation results, summarized the design methods, and wrote paper as co-first author
- Led the five-person team, and took charge of project schedule management and task allocations
- Paper(TENCON’24): A Low-Latency and High-Accuracy Dual-Mode Neuron Design for Accelerating Neurological Diseases Simulation and Analysis
International Contest of Autonomous Running Robots

[July - Aug 2023] Four-person Team Leader
- Developed surroundings recognition algorithms in Python, allowing the robot to autonomously identify its environment and execute corresponding actions to overcome obstacles such as single-plank bridges, stairs, and minefields
- Designed sequences of servo motor parameters to control the robot’s movements, including forward motion, redirection, and rolling over
Digital Image Processing System Based on PYNQ-Z2 FPGA
[Dec 2023 - Jan 2024] Three-person Team Leader
- Developed a image processing system on FPGA, capable of performing image enlargement, edge extraction, erosion, and dilation, with output displayed via HDMI
- Designed the image processing system’s overall framework, the system control unit and HDMI display module using Verilog Hardware Description Language